Monitor, force, and simulate input and output signals
Create and execute Macros
Setup Tool, TCP
Create Weld Procedures
Utilize Weld Process Schedules
Utilize Ramping
Execute Adjustments
Power up and power down the robot system
Execute Teach Pendant Operations
Spot Gun mastering and Zeroing
Force calibration
Create and execute MACROs
Monitor, force, and simulate input and output signals
Identifying common Dispense tool equipment configurations
This course covers the setup and functionality of a Device Net Interface
Course Objectives
Students successfully completing this course will be able to.
Describe function and purpose of Device Net
Describe Device Net installation
Troubleshoot typical Device Net Problems
Create, modify and execute a material handling program
Course Objectives
Backup and restore individual programs and files
Create and Update TPP programs
Create and Update KAREL programs
Debug, compile and load a KAREL file
Test and run KAREL and teach pendant programs in RoboGuide
Basic Introduction to Industrial Robots
MECHANICAL MANIPULATOR
ROBOT CONTROLLER
TEACH PENDANT
END OF ARM TOOLING (EOAT)
6 Axis Arm
Types of Industrial Robots
SCARA Arm
Flex picker Arm
Cobot Arm
Different Application of Industrial Robots
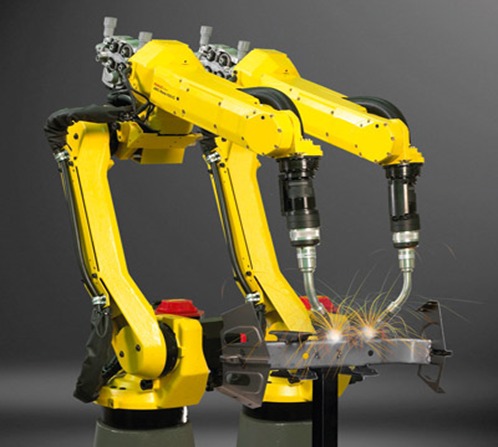
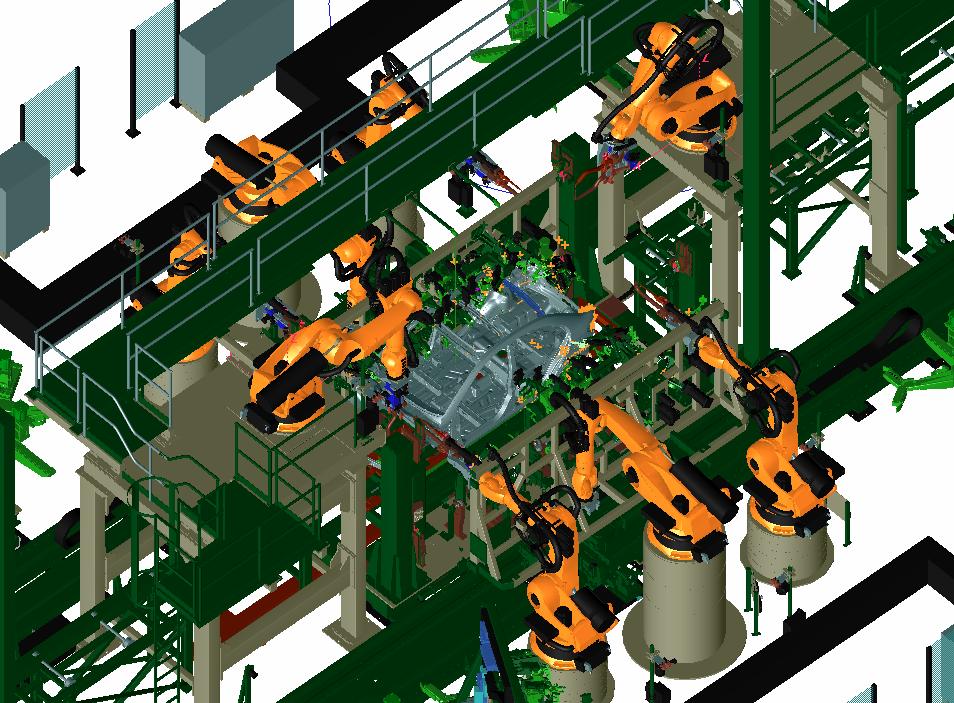
Spot Welding
Material Handling
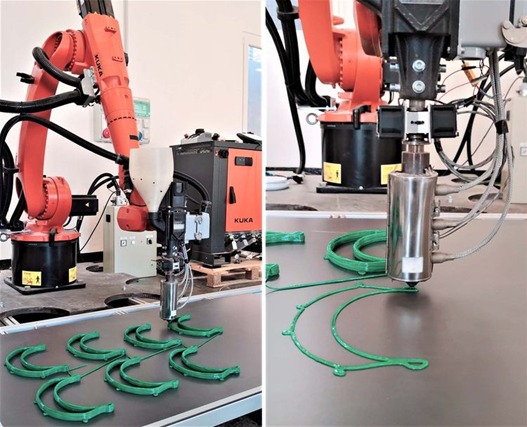
Dispensing
Painting
MiG welding
etc
Use and Selection Criteria of Industrial Robots
Though the robot designs are meant to be used with various applications all robots cannot perform all tasks.
A great care has to be executed while selecting a robot for a particular application. These criteria will enable the robot manufacturer to load the application specific software options & the hardware features while manufacturing the robot.
Some important specifications to look out for in a Robot